: TF 기능이란 차량 좌표계, 센서 좌표계를 ROS 메시지로 제공해주는 기능. 이 기능은 통신 방식이 ROS일 때만 지원한다.
TF 기능 사용법
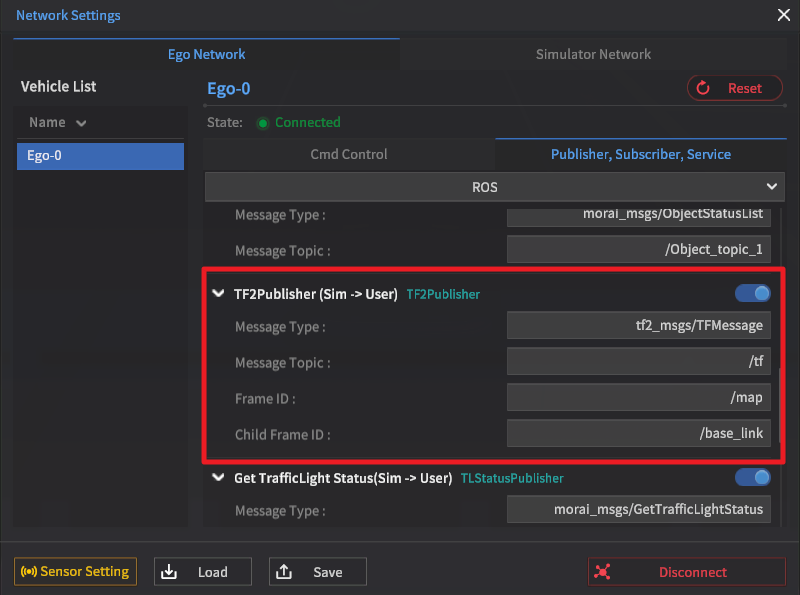
Network - Network Settings ROS 를 선택 후 TF2Publisher 를 확인 할 수 있다.
TF2Publisher
F2Publisher의 항목에 FrameID, ChildFrameID 항목이 있다. Defualt 프레임 아이디는 아래와 같다.
FrameID에는 맵 좌표계를, ChildFrameID에는 차량 좌표계를 입력하고 Apply를 누른다.
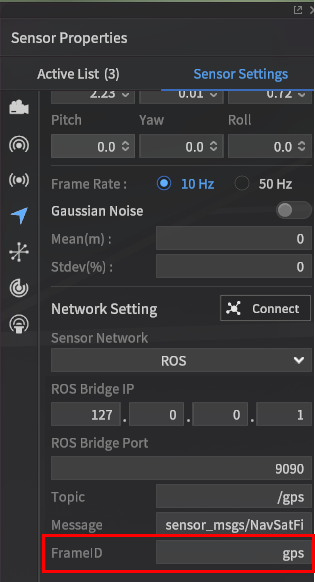
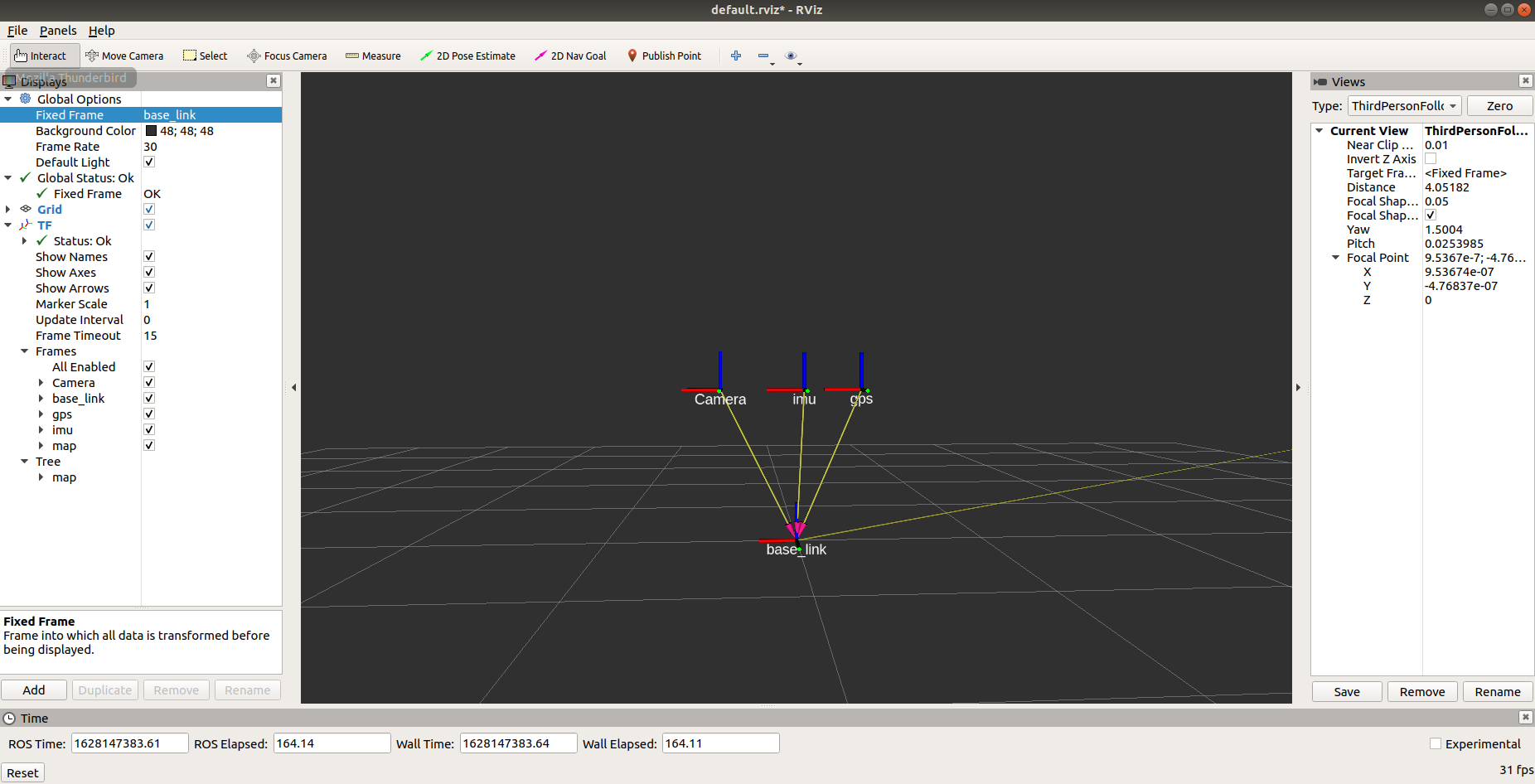
센서 부착 시 센서 좌표계 또한 TF2Publisher 에서 세팅한 차량 좌표계 기준으로 센서 좌표계가 만들어 진다.
센서를 부착하지 않았다면 차량 좌표계만 생성된다.누른다.